One of the most straightforward operations you can do when you want to make a new matroid out of old ones, is taking the direct sum. The direct sum of the matroids $M_1=(E_1,r_1)$ and $M_2=(E_2,r_2)$ is the matroid $M$ on ground set $E=E_1\sqcup E_2$ with for all $A\subseteq E$,
\[ r(A)=r_1(A\cap E_1)+r_2(A\cap E_2). \]Alternatively, its independent sets are the unions of an independent set in $M_1$ and an independent set in $M_2$. The third equivalent way to define the direct sum is by saying that $M=M_1\oplus M_2$ is precisely the matroid such that $M|_{E_1}=M/E_2=M_1$ and $M|_{E_2}=M/E_1=M_2$.
In this post, we will discuss the q-analogue of this concept. The q-analogues of matroids, called q-matroids, have been introduced here. Instead of considering a matroid on a finite ground set, where every subset has a rank that satisfies certain axioms, we take a q-matroid on a finite dimensional vector space where every subspace has a rank, again satisfying certain axioms. A good intuition is to think about matroids as a bicolouring of the Boolean lattice, and q-matroids as a bicolouring of the subspace lattice.
If we take the direct sum of two q-matroids $M_1=(E_1,r_1)$ and $M_2=(E_2,r_2)$, it makes sense for $M=M_1\oplus M_2$ to have as a ground space the direct sum of vector spaces $E_1\oplus E_2$. It is also reasonable to ask that $M|_{E_1}=M/E_2=M_1$ and $M|_{E_2}=M/E_1=M_2$. But then it gets difficult. Where for sets, we can write any subset $A\subseteq E_1\sqcup E_2$ as $(A\cap E_1)\sqcup(A\cap E_2)$, such a thing is not true for vector spaces. Suppose for example $E_1=\langle100\rangle$ and $E_2=\langle010,001\rangle$ (over my favourite finite field $\mathbb{F}_2$) such that $E_1\oplus E_2$ is a 3-dimensional space. Then the space $A=\langle111\rangle$ does not intersect $E_1$ nor $E_2$. What is its rank going to be?
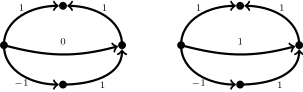
One could hope that maybe the rank axioms of q-matroids take care of this. Look for example at the direct sum of $U_{1,1}$ and $U_{1,2}$ over $\mathbb{F}_2$.
We see that the interval between $0$ and $\langle100\rangle$ and the interval between $\langle010,001\rangle$ and $E$ are coloured as $U_{1,1}$, showing $M|_{E_1}=M/E_2=M_1$. On the other hand, the interval between $0$ and $\langle010,001\rangle$ and the interval between $\langle100\rangle$ and $E$ are coloured as $U_{1,2}$, showing that $M|_{E_2}=M/E_1=M_2$. There is now only one way to colour the rest of the lattice:
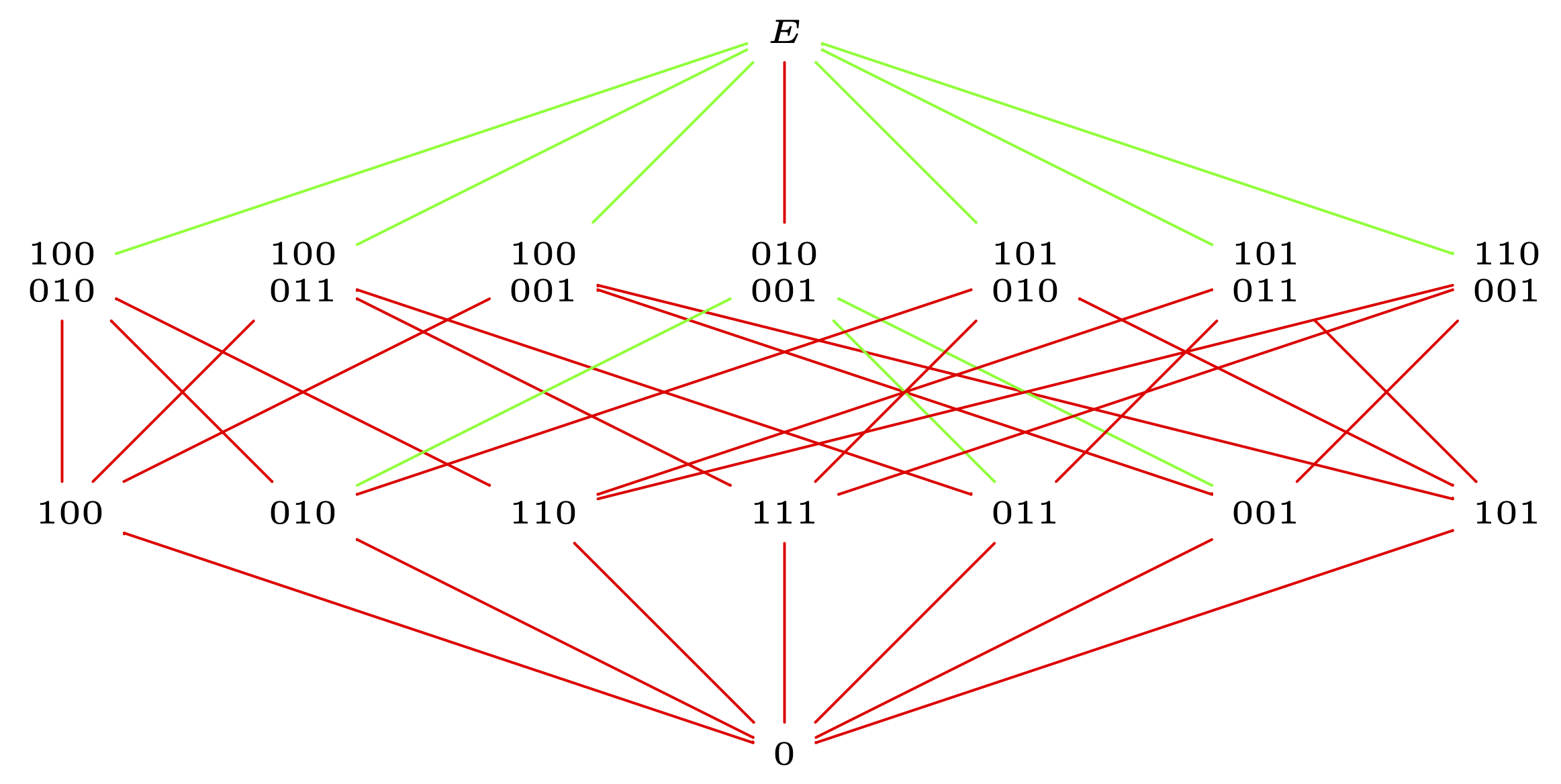
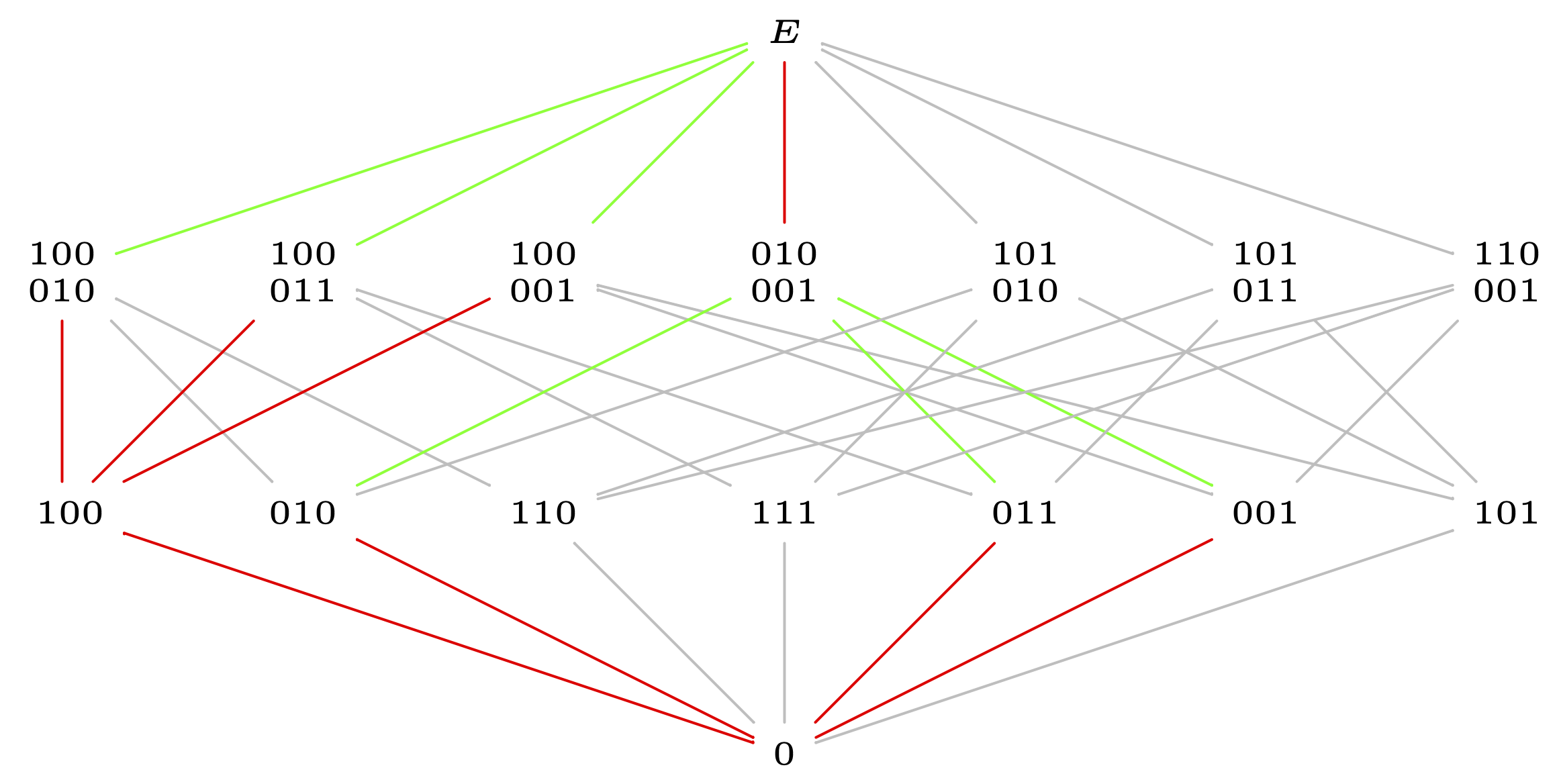
Unfortunately, this construction becomes not unique already in dimension 4. If we try to make the direct sum $U_{1,2}\oplus U_{1,2}$, semimodularity of the rank function gives that all 1-dimensional spaces have rank 1 and all 3-dimensional spaces have rank 2. Any 2-dimensional space intersecting $E_1$ or $E_2$ is a basis. But there are 2-dimensional spaces that intersect neither $E_1$ nor $E_2$ (over $\mathbb{F}_2$, there are three of them) and those can be either a basis or a circuit. Any choice will produce another q-matroid.
The solution to this problem is to write the direct sum in a very convoluted way that is not helpful for matroids over sets, but that does have a nice q-analogue. This is the following. As mentioned, let $E=E_1\oplus E_2$. Make a matroid $M_1’$ by adding loops to $M_1$ until its groud space is $E$: $M_1’$ is the q-matroid on $E$ such that $M_1’|_{E_1}=M_1$ and $M_1’|_{E_2}$ consists of only loops. Similarly, let $M_2’$ be the q-matroid on $E$ such that $M_2’|_{E_2}=M_2$ and $M_2’|_{E_1}$ consists of only loops. Now the direct sum $M_1\oplus M_2$ is defined as the matroid union $M_1’\vee M_2’$.
It turns out that adding loops is, inductively, possible in the q-analogue. Also matroid union (as an honour to the name of this blog, surely!) has a well-defined q-analogue: this operation is defined for matroids on the same ground set, and can thus be generalised to q-matroids with the same ground space without the troubles that come with the direct sum of vector spaces. The rank function of the direct sum of two q-matroids is \[ r_{M_1\oplus M_2}(A)=\min_{X\subseteq A}\{r_{M_1′}(X)+r_{M_2′}(X)+\dim A-\dim X\}. \]
An equivalent way to phrase this definition of the direct sum of q-matroids, is by requiring the direct sum to to be the “most independent” q-matroid satisfying $M|_{E_1}=M/E_2=M_1$ and $M|_{E_2}=M/E_1=M_2$. This can be made precise in category theory language.
It is unclear what the independent spaces of the direct sum of two q-matroids are. The vector space sum of an independent space in $M_1$ and an independent space in $M_2$ is independent in the direct sum. But there are many more independent spaces. Many other properties of the direct sum of matroids fail to have a nice q-analogue. What does work in the q-analogue, is that the cyclic flats of the direct sum are exactly the sums of the cyclic flats of $M_1$ and $M_2$.
You might have guessed that if $M_1$ and $M_2$ are q-matroids represented by matrices $G_1$ and $G_2$ (I’m going to use this notion without a formal definition), then their direct sum is not necessarily represented by the matrix \[ \left[ \begin{array}{cc} G_1 & 0 \\ 0 & G_2 \end{array} \right]. \] Interestingly, the question about representability can be translated to the language of linear sets in finite geometry, making it possible to use several results in finite geometry for q-matroids.
References
[AJNZ26] Gianira Alfarano, Relinde Jurrius, Alessandro Neri and Ferdinando Zullo. Representability of the direct sum of uniform q-matroids. Combinatorial Theory, 6 (2026).
[CJ24] Michela Ceria and Relinde Jurrius. The direct sum of q-matroids. Journal of Algebraic Combinatorics, 59, pp. 291-330 (2024).
[GLJ23] Heide Gluesing-Luerssen and Benjamin Jany. Coproducts in categories of q-matroids. European Journal of Combinatorics 112, 103733 (2023).
[GLJ24] Heide Gluesing-Luerssen and Benjamin Jany. Decomposition of q-matroids using cyclic flats. SIAM Journal on Discrete Mathematics 38, pp 2940–2970 (2024).
[GLJ25] Heide Gluesing-Luerssen and Benjamin Jany. Representability of the direct sum of q-matroids. Journal of Algebraic Combinatorics 61, 51 (2025).